The Second RCX
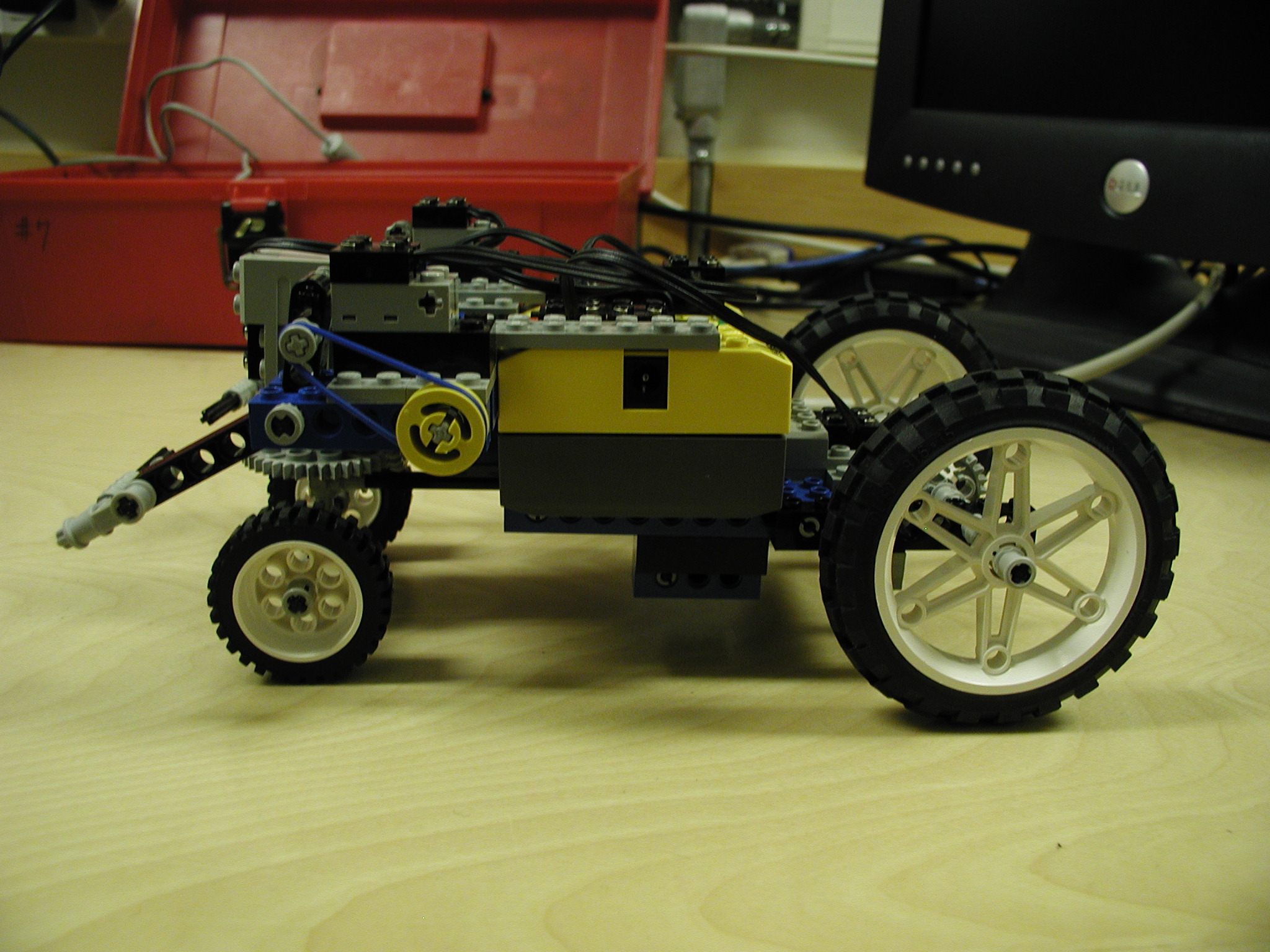
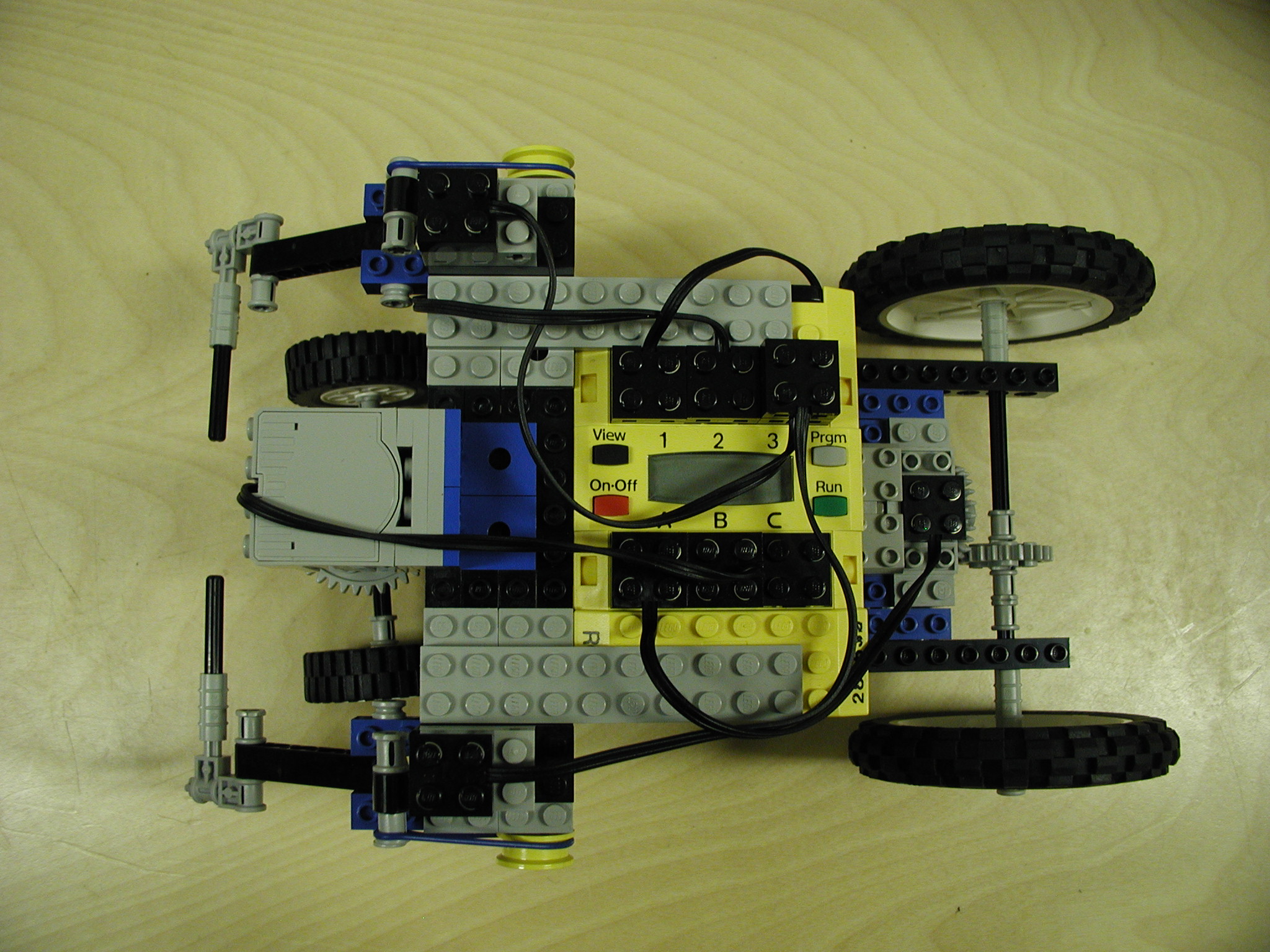
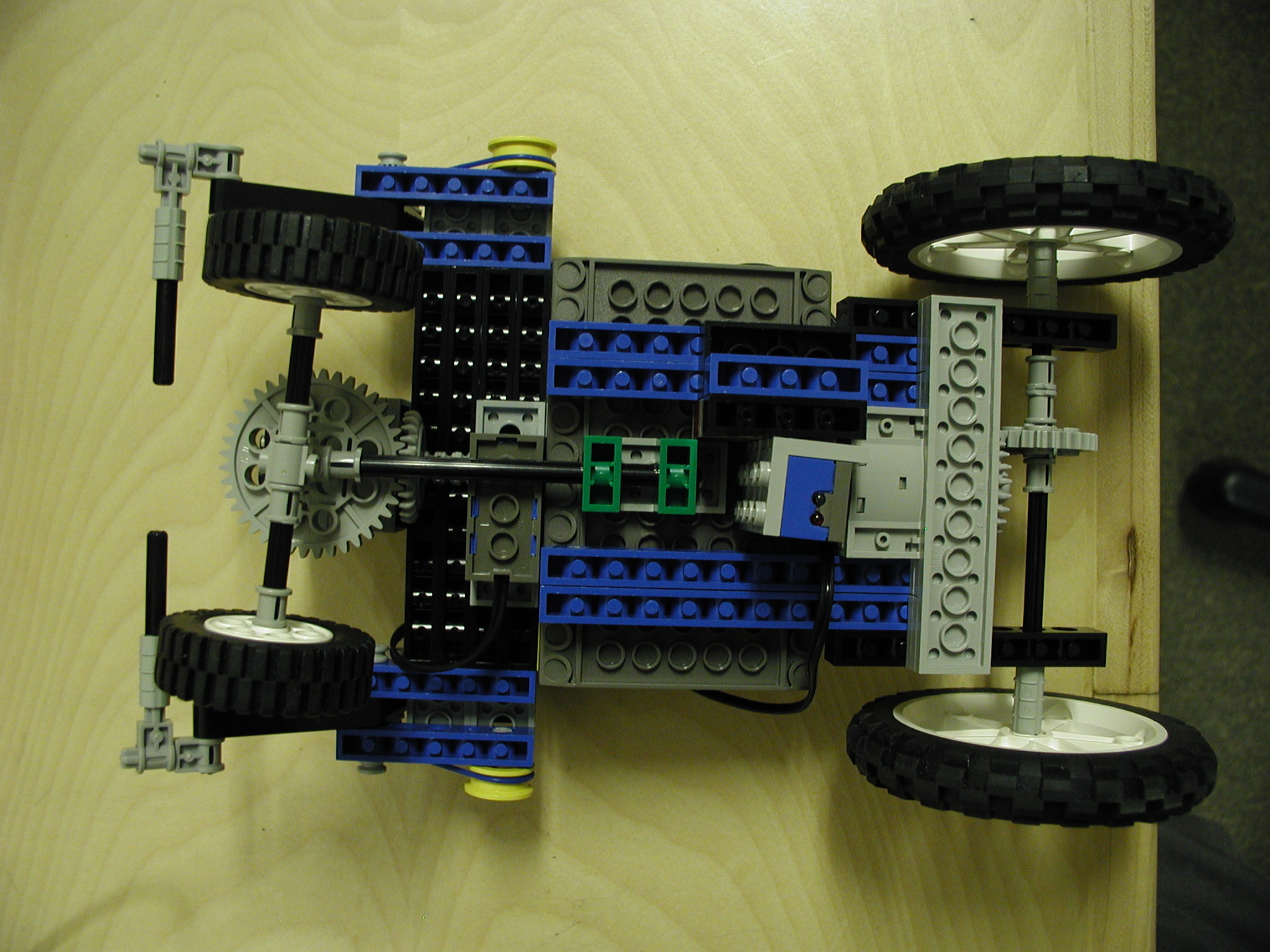
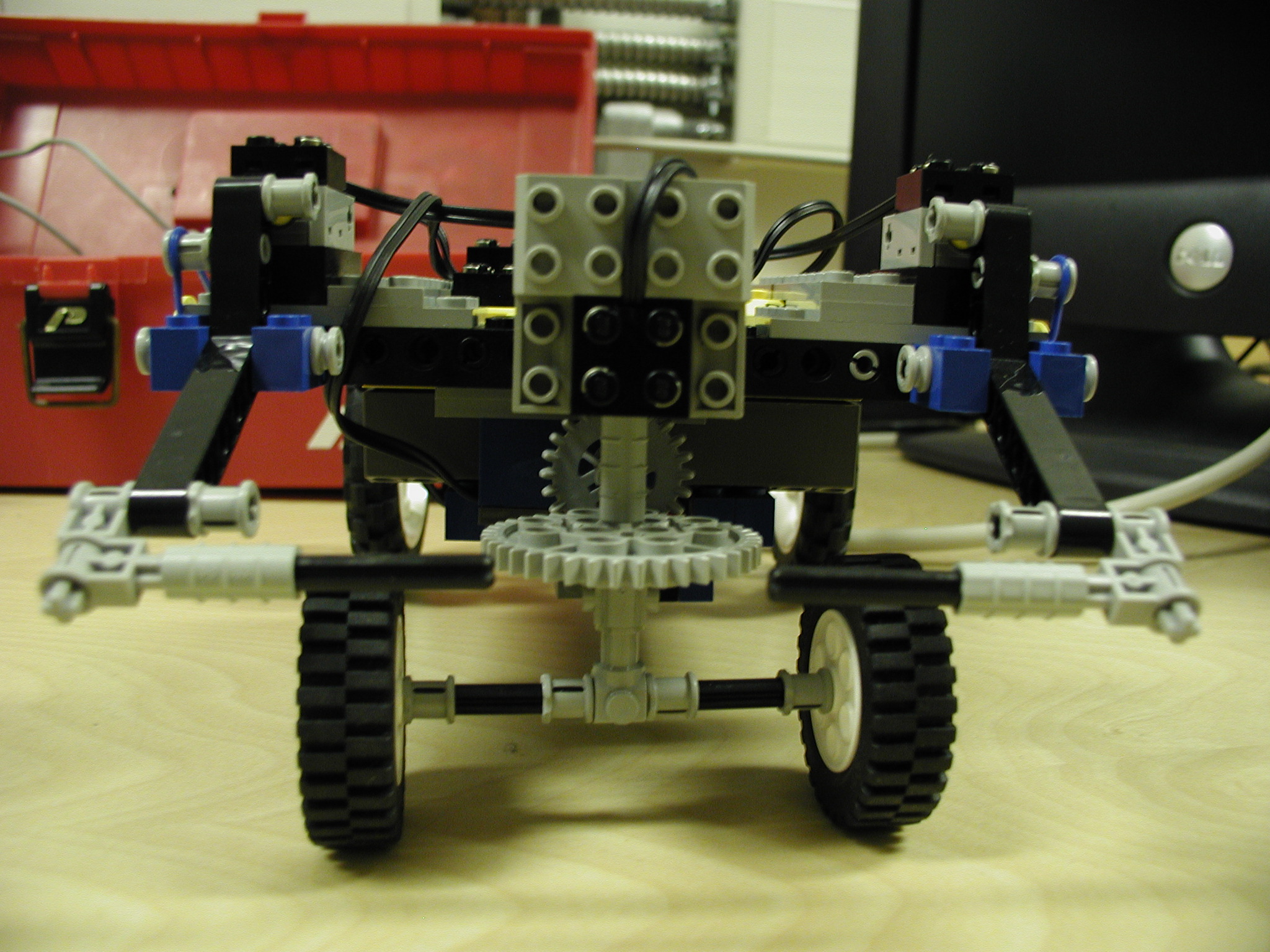
An RCX that was built with an independent steering drive, which was supposed to follow a line and avoid obstacles. First implementation of listeners.
Sensors: Light, Rotation (Light + Rotation = Servo), 2 touch.
Images:
+Side
+Top
+Bottom
+Front
Files:
+BumperListener.java
+CapnKirk.java
+LightListener.java
+Navigator.java
+Pilot.java
+Sensors.java
{kind=link}
{kind=link}
{kind=link}
{kind=link}