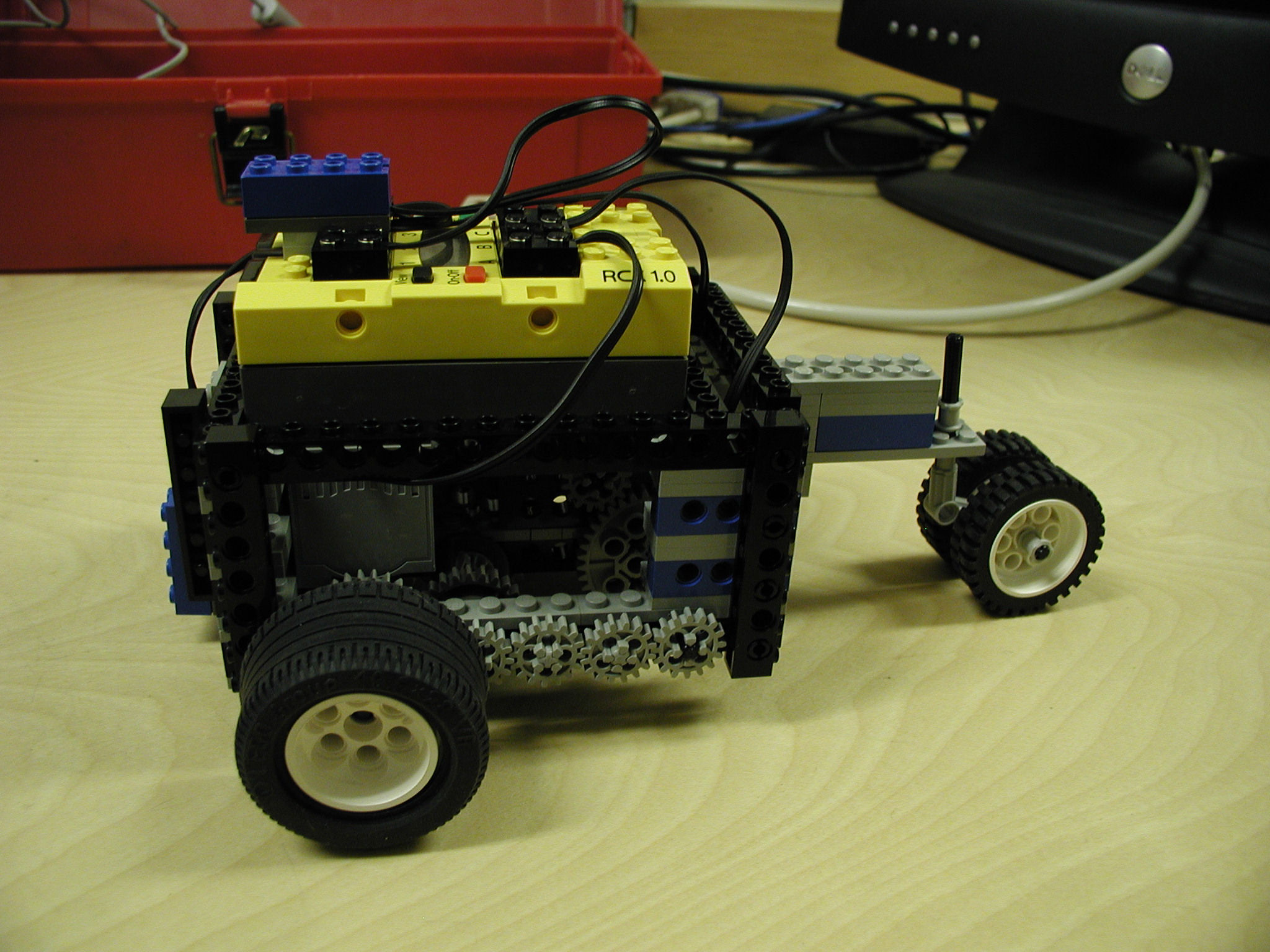
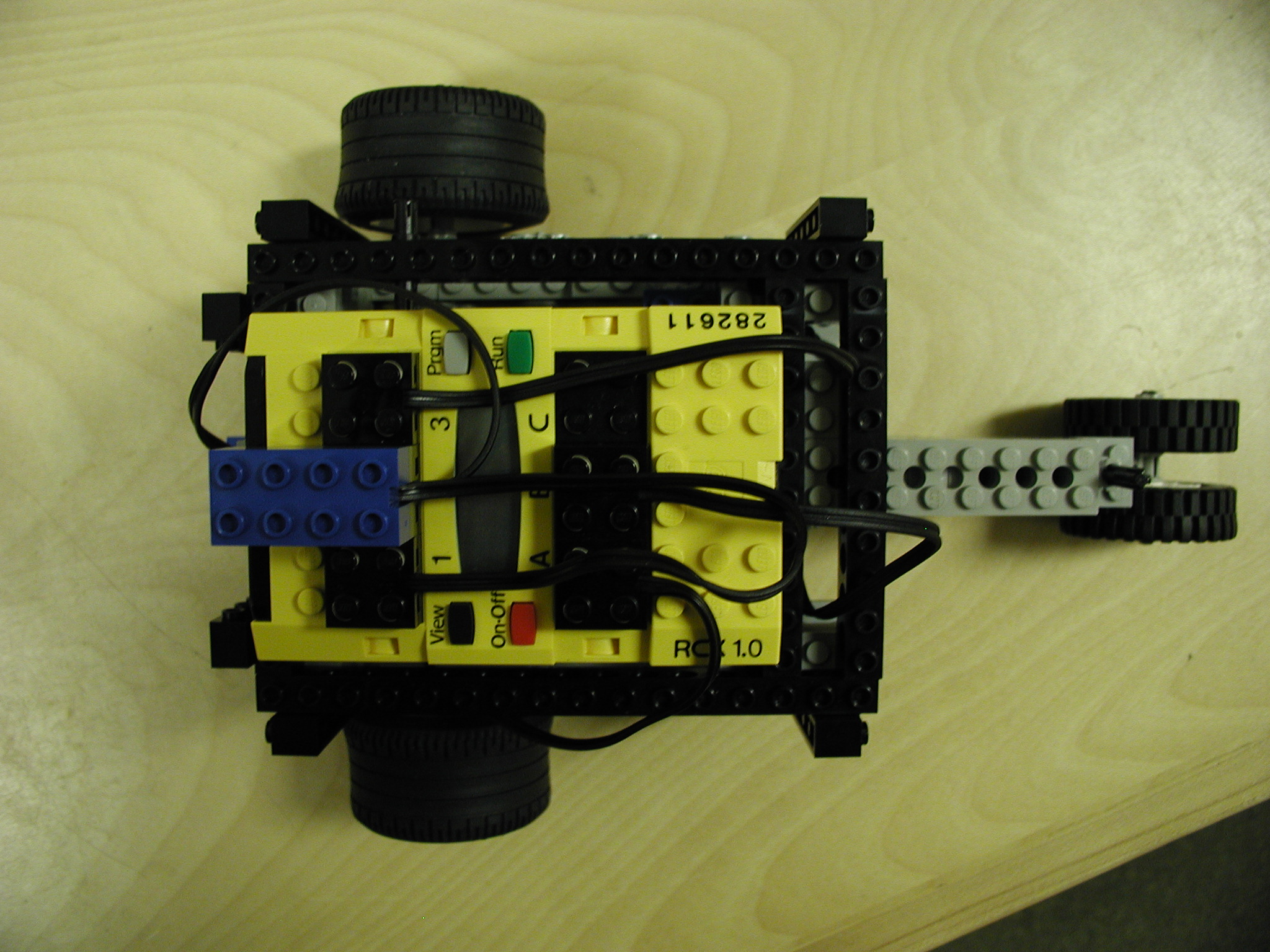
The Third RCX
An RCX that features a dual differential drive for straight steering and turning in place that follows a straight line and avoids obstacles.
Sensors: Proximity, Light, Rotation.
Images:
+Side
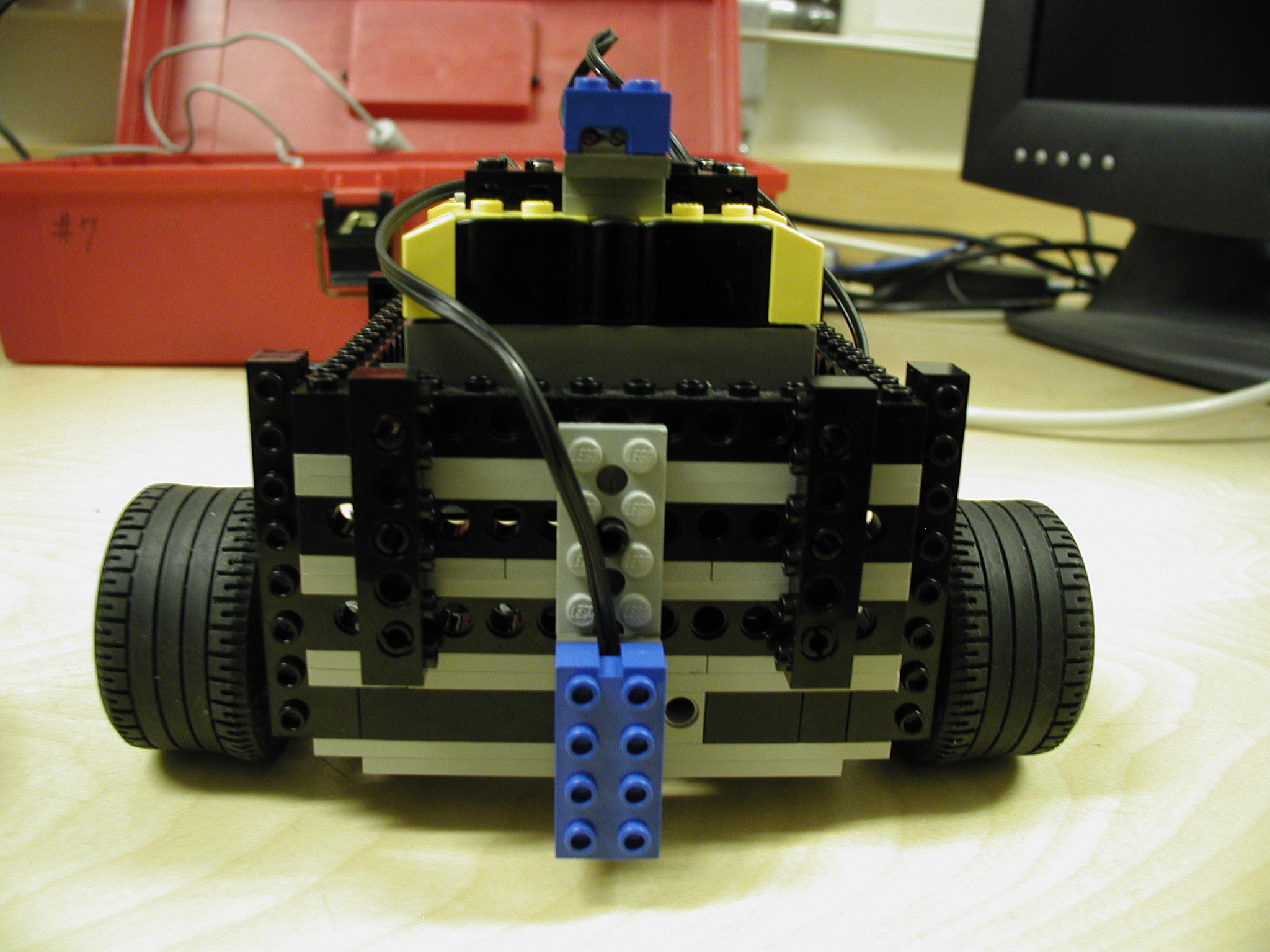
+Front
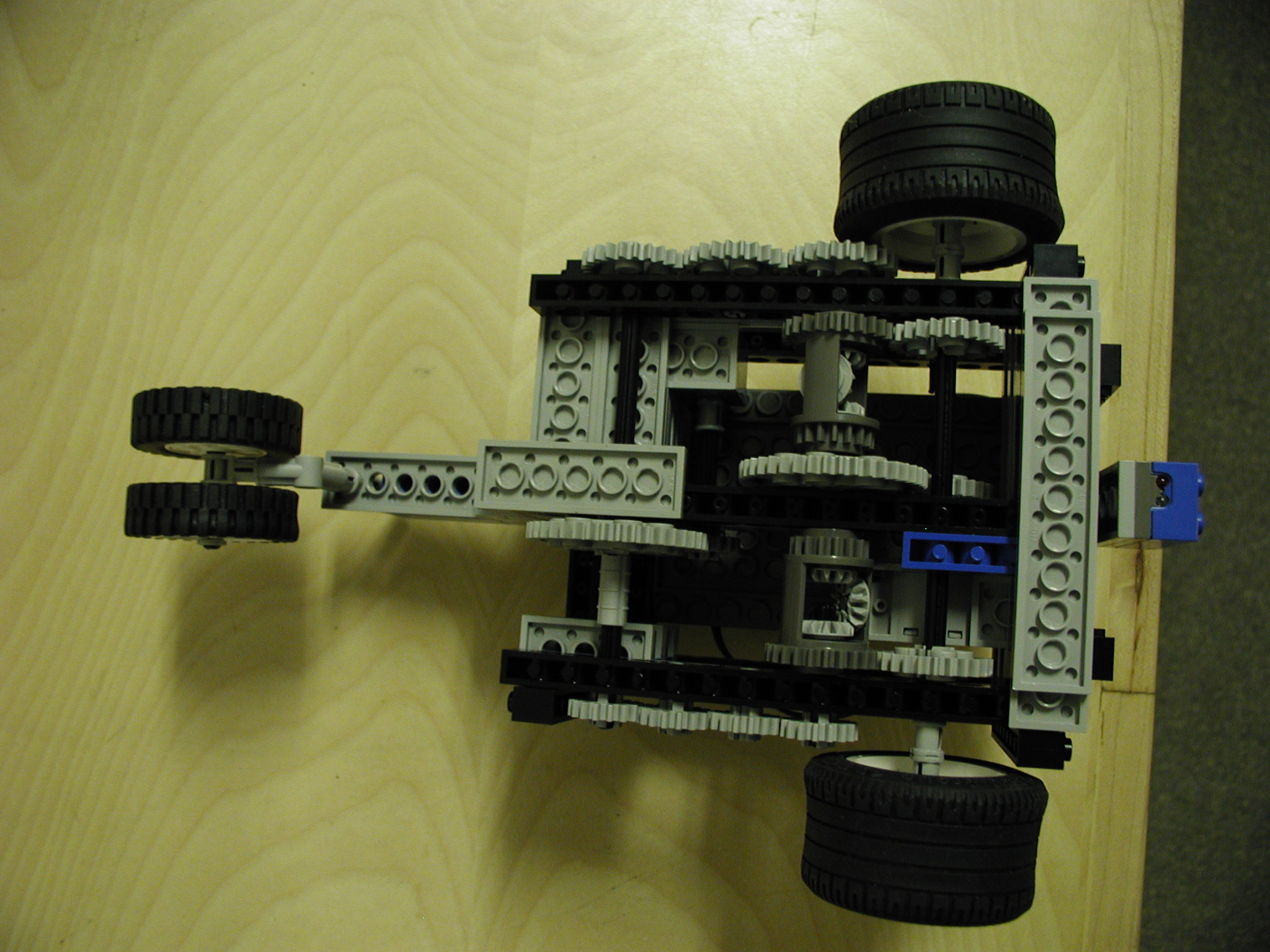
+Bottom
+Dual differential closeup (bottom)
+Top
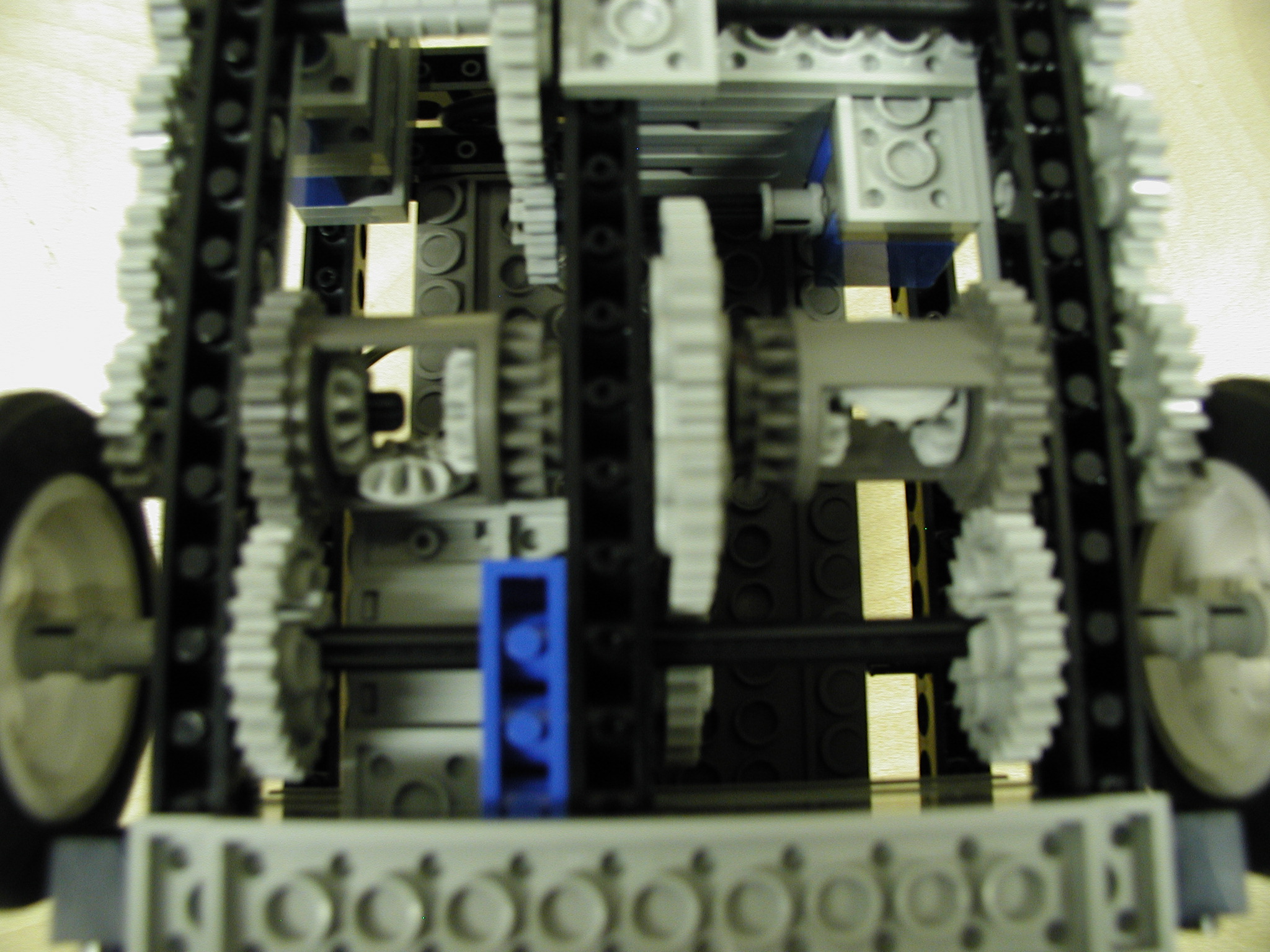
+Interior gearing, motors and rotation sensor
+Interior gearing, motors and rotation sensor
(sensor more visible) from other side
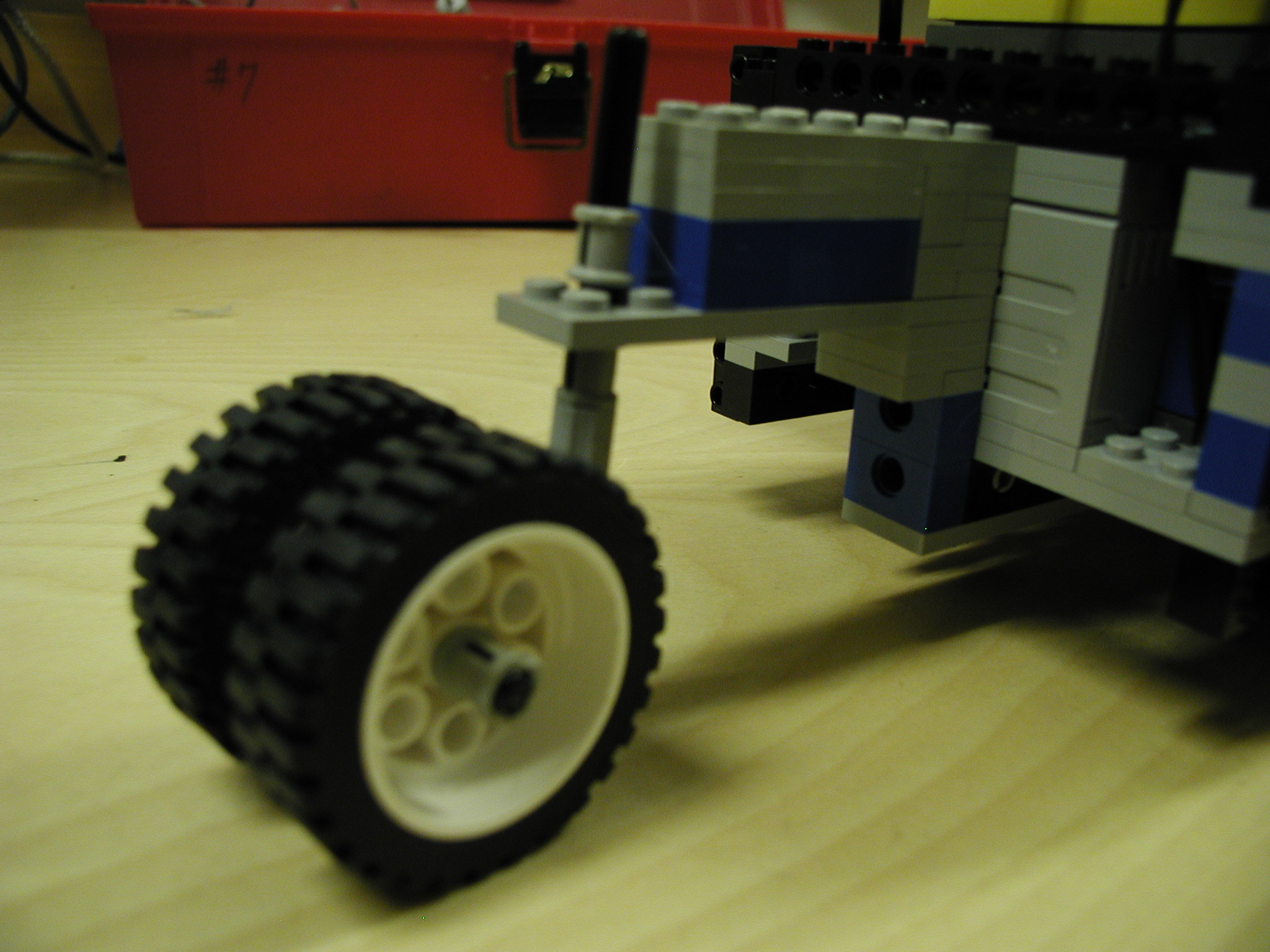
+Back wheel
+Proximity sensor
+Light sensor
Files:
+FollowTheBlackLine.java
+LightListener.java
+Pilot.java
+PrettyBoy.java
+ProxListener.java
+RotationListener.java
+Senses.java
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}